Détection et suivi de fissures par Corrélation d’Images Numériques: un outil de choix
- Par Floriane Soulas, Ingénieure R&D chez EikoSim
Contexte
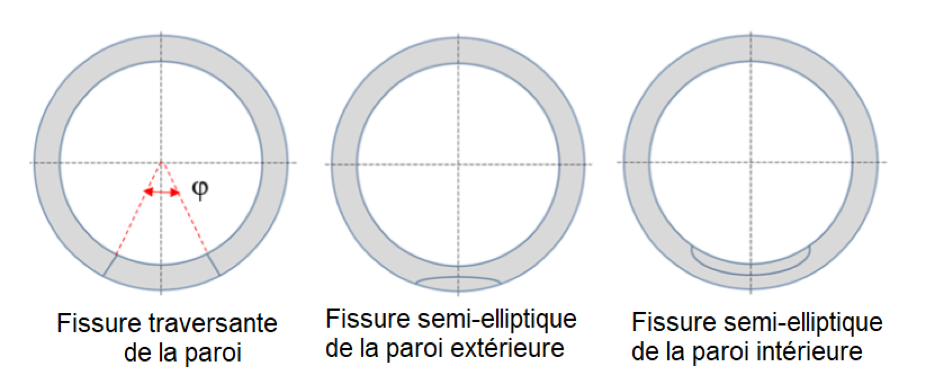
Certaines structures possèdent une durée de vie longue depuis leur mise en service jusqu’à leur remplacement. Ces structures, lorsqu’elles ont un rôle fondamental, doivent pouvoir maintenir leur intégrité physique tout au long de leur mise en service. Pour ce faire, il est primordial de s’assurer de leur fiabilité au cours du temps. Dans le cas de structures telles que des canalisations d’eau métalliques, différents types d’endommagement peuvent apparaitre en fonctionnement mais le plus néfaste d’entre eux est l’ouverture et la propagation de fissure dans les tuyaux (fig. 1). Pour prévenir ces dégâts irréversibles et intervenir à temps, on réalise des simulations numériques permettant de prédire les endommagements dus au vieillissement des canalisations.
Dans ce cadre, l’essai que nous abordons dans cet article est dédié au suivi d’ouverture et de propagation de fissure sur une éprouvette sollicitée en flexion afin de permettre le recalage et la validation d’une loi de comportement numérique pour la fissuration du matériau de la canalisation.
Suivi de déplacement par mesure de champ en stéréo-corrélation
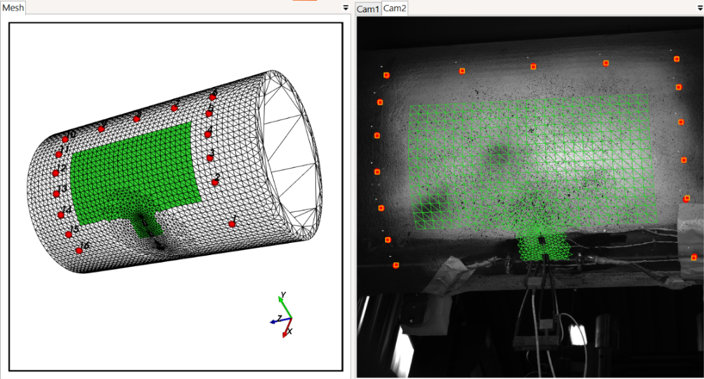
Suivant les indications de la figure 1, une pré-fissure a été réalisée dans une éprouvette. Une paire de caméras est disposée de façon à observer la zone d’intérêt et la propagation de la fissure dans la direction prévue par la simulation numérique. On définit la zone d’étude (en vert sur la fig. 2) et les points de pré-étalonnage (en rouge) directement à partir du maillage éléments finis fourni par le client (dans notre logiciel de mesure par corrélation d’images numériques) et ce avant la mise en chargement de la structure.
Le résultat de la mesure sera exprimé directement sur le maillage éléments finis de la pièce, ce qui permet une comparaison immédiate avec les champs de déplacements prévus par le calcul de dimensionnement pour la sollicitation considérée.
Détermination de la pointe de fissure
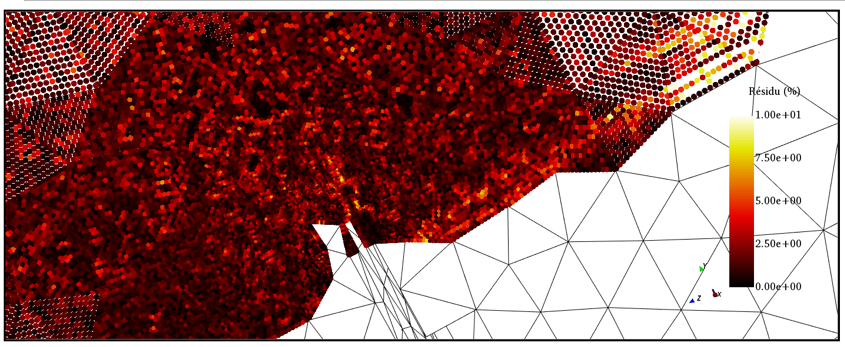
Afin de suivre l’évolution de la fissure au cours du temps, nous nous intéressons plus particulièrement au calcul des résidus. En effet, les résidus calculés dans EikoTwin DIC permettent de quantifier l’erreur globale de corrélation. Le résidu correspond à la différence entre l’image de référence (la première image) et l’image déformée, corrigée du champ de déplacement mesuré. Il est calculé pour chaque point d’évaluation du calcul de corrélation, nous permettant ainsi de suivre « en temps réel » l’apparition de la fissure.
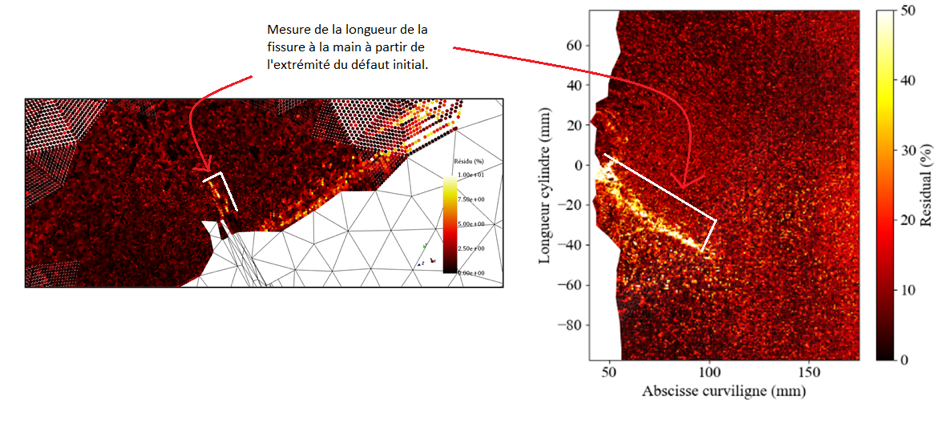
La fig. 3 présente deux images successives au cours desquelles on peut voir apparaitre l’amorce de la fissure via l’affichage des résidus de mesure (en jaune au niveau de la pré-fissure).
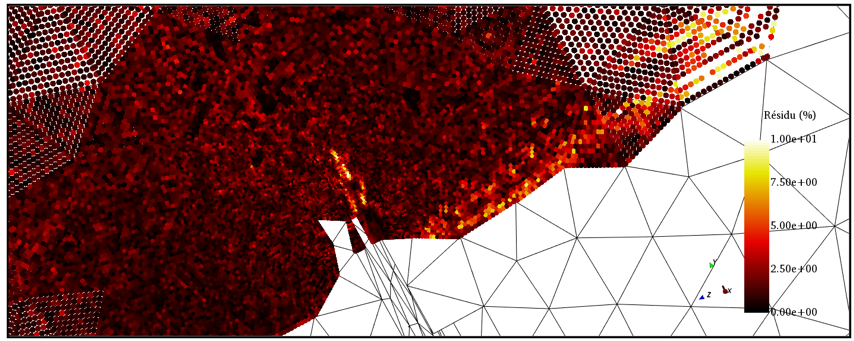
La position de la pointe de fissure est relevée à la main, image par image, comme montré sur la fig. 4. Il s’agit d’une longueur de propagation à partir de la pointe du défaut initial dont la position est relevée a priori. L’incertitude opérateur sur cette mesure est, au maximum, évaluée à environ 0.2mm pour chaque image.
Suivi de la propagation
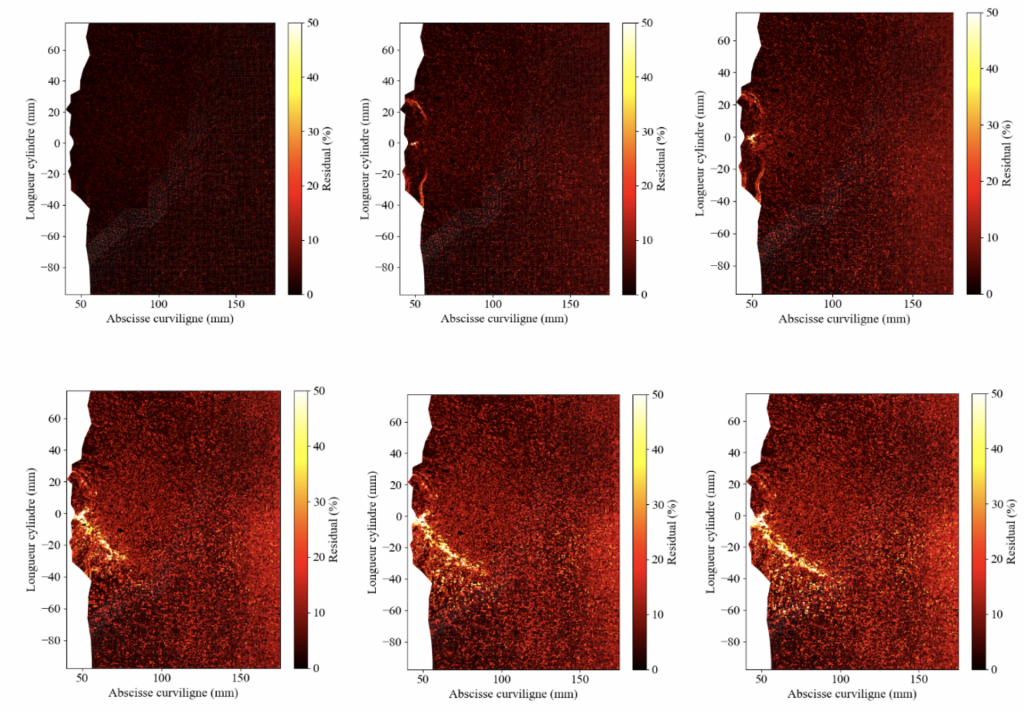
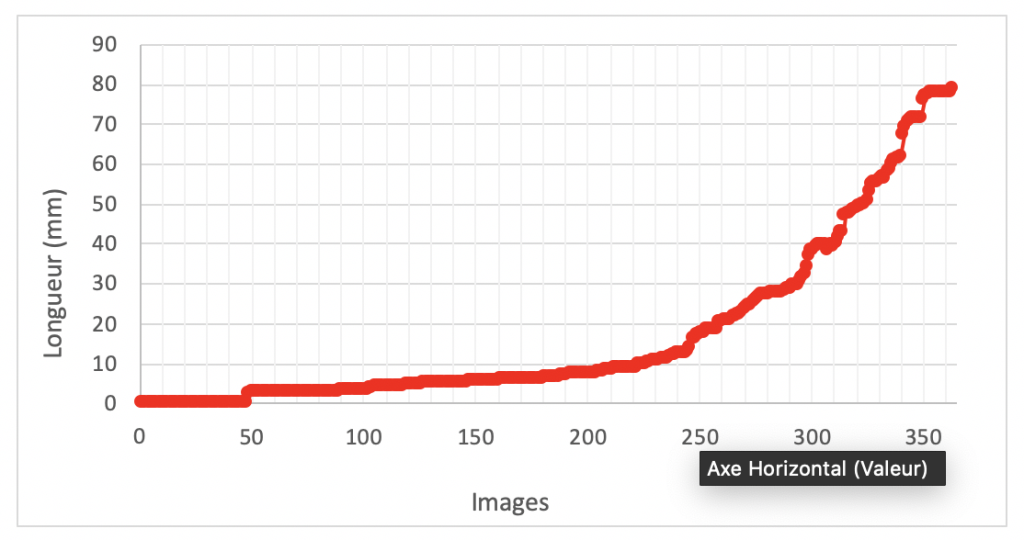
Grâce aux cartographies de résidus, il est possible de suivre image par image l’évolution de la fissure et de récupérer les coordonnées de la pointe de fissure au cours du temps. En extrayant cette position image par image, il est ainsi possible de mesurer la longueur de la fissure sur l’ensemble des images (longueur par rapport à la pointe du défaut initial) et ainsi de tracer son évolution. La fig. 5 présente une sélection de cartographies permettant de visualiser l’apparition et l’évolution de la fissure son amorce et la fin de l’essai. La fig. 6 trace l’évolution de la longueur de la fissure au cours du temps.
En conclusion, on peut tirer de cette essai une grande richesse de données. La stéréo-corrélation permet en plus de fournir des champs de déplacement et de déformation 3D, de détecter, de suivre et de mesurer l’apparition et la propagation d’une fissure lors d’un essai dédié sur une éprouvette sollicitée en flexion instrumentée, via l’étude des cartographies de résidus. Les cartographies obtenues permettent de visualiser de façon claire l’apparition et la propagation de la fissure au cours de l’essai et de mesurer de manière quantitative son évolution.
98-100 AVENUE ARISTIDE BRIAND
92120 MONTROUGE
FRANCE