L’étalonnage hybride : une alternative robuste à l’auto-étalonnage
- Par Pierre Baudoin, Ingénieur R&D chez EikoSim
Introduction
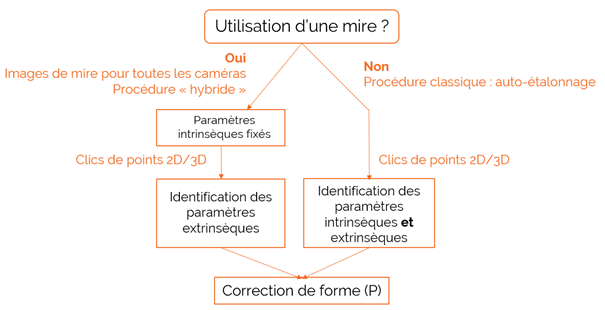
Cet article est rédigé en complément de l’article sur les bonnes pratiques d’étalonnage publié récemment sur notre site. En général, il est très souvent possible d’étalonner le système de caméras grâce à la connaissance de la géométrie de la pièce et de correspondances entre points du modèle et images de la structure au repos. Dans ce cas, les paramètres intrinsèques et extrinsèques [1] de chacune des caméras sont initialisés simultanément lors du pré-étalonnage. Dans certains cas, notamment lorsque la géométrie de la pièce imagée est très proche de celle d’un plan, il peut néanmoins être intéressant de découpler l’initialisation des paramètres intrinsèques et extrinsèques des caméras. On utilise alors une procédure d’étalonnage qu’on qualifie d’« hybride ». Les paramètres intrinsèques de chacune des caméras sont obtenus séparément à partir d’images de mires d’étalonnage. Dans un deuxième temps, les paramètres extrinsèques sont déterminés en utilisant les images de la pièce elle-même. Les deux procédures sont résumées sur la Figure 1. Pour connaître la procédure qui est la plus adaptée à votre cas, n’hésitez pas à consulter l’article dédié ; nous nous concentrons dans ce post sur l’étalonnage hybride.
[1] Pour rappel, les paramètres extrinsèques d’une caméra définissent la position et l’orientation de la caméra dans le repère global. Les paramètres intrinsèques caractérisent le système capteur caméra/objectif (distance focale, taille du capteur, centre optique, skew).
Dans une première partie, nous vous présenterons les mires utilisées pour la première étape de l’étalonnage hybride ; dans la seconde partie de l’article, nous allons nous pencher sur la procédure à respecter lors de la prise d’images de mires afin de garantir une bonne identification des paramètres intrinsèques.
Présentation des mires ChArUco
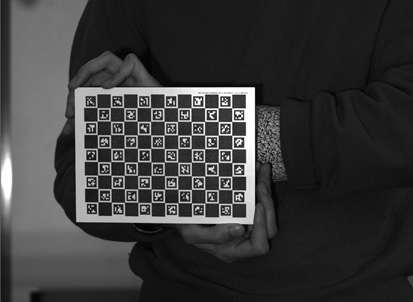
EikoSim a fait le choix d’utiliser des mires « ChArUco » pour effectuer cet étalonnage hybride (Figure 2). Ces mires diffèrent des mires à damier classiques (type échiquier) par le fait qu’une case sur deux contient un marqueur ArUco unique, qui peut être facilement détecté et identifié par des algorithmes de traitement d’images disponibles dans la librairie OpenCV. Outre leur faible coût d’achat, l’avantage de ces mires par rapport aux mires à damier classiques est que chaque case du damier, et donc chaque coin, est identifiable de manière unique, ce qui permet de traiter des images même lorsque le damier n’est pas entièrement visible sur l’image.
Les essais réalisés en interne chez EikoSim ont permis de définir une série de critères à respecter pour s’assurer que les images de mires acquises par l’utilisateur permettent une détermination correcte des paramètres intrinsèques recherchés à cette étape :
- Nombre d’images : on recommande la prise de 20 images par caméra. Ces images peuvent être acquises de manière synchronisée entre les caméras ou non, car les paramètres intrinsèques sont déterminés de manière indépendante pour chacune des caméras. Il faut cependant s’assurer que les mires apparaissent nettement à l’image, car l’algorithme de détection des coins du damier peut échouer si les images sont floues.
- Taille de la mire dans l’image : idéalement, la mire doit occuper au moins 50% de la taille de l’image sur l’ensemble des caméras. On conseille de balayer l’ensemble de l’espace de travail volumique de la caméra tel que décrit dans la section 3.2.2.4 du guide IDICS.
- Variation d’orientations de la mire : une variation de 20° selon les deux axes du plan de l’image sont suffisants pour déterminer les paramètres intrinsèques avec un degré de précision satisfaisant.
Le respect de ces critères est vérifié dans le logiciel lors du chargement des images de mires dans le logiciel.
Traitement des images de mires par EikoTwin DIC 1.2
L’import des images de mires dans le logiciel se fait après avoir créé une caméra en important les images d’essai dans l’onglet « Images ». Afin de pouvoir charger ces images de mire, l’utilisateur est amené au préalable à spécifier la référence de la mire employée pour l’étalonnage (Figure 3). Une mire ChAruCo est définie entièrement par six paramètres : le nombre de cases du damier selon l’horizontale et la verticale, la largeur des cases (en mm), la largeur des marqueurs au sein des cases (en mm) et le nombre de bits utilisés pour chacun des marqueurs (nombre d’unités).
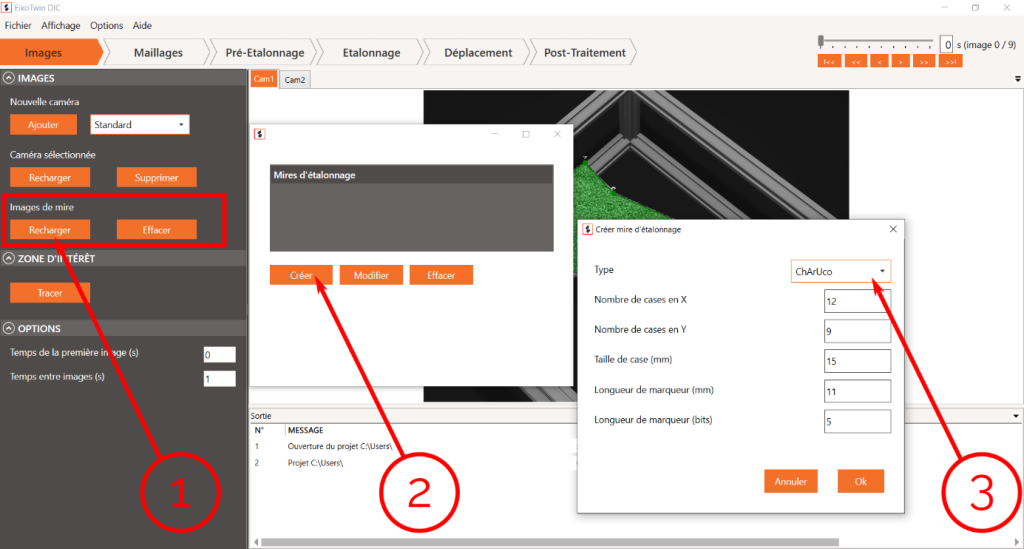
Ces données sont en général directement visibles sur la mire elle-même (cf. Figure 2). Une fois le type de mire renseigné, l’utilisateur peut charger un dossier d’images correspondant à cette mire pour chacune des caméras.
Une fois ces images chargées, le logiciel conduira une analyse des images de mires afin de déterminer si elles satisfont aux critères décrits dans le paragraphe précédent (variation de l’angle d’orientation de la mire sur l’ensemble des images, nombre de coins visibles minimum atteint, taille des mires suffisante sur l’image). Si ces critères sont remplis, la matrice de paramètres intrinsèques K retournée par l’algorithme de traitement des images de mires sera utilisée pour la suite de l’étalonnage, lors duquel seuls les paramètres extrinsèques seront déterminés et mis à jour.
La suite du post-traitement dans EikoTwin DIC 1.2 (mesure de l’écart de forme et calcul des déplacements) demeure identique à l’usage actuel du point de vue de l’utilisateur. Vous voilà maintenant parés pour effectuer un étalonnage hybride !
98-100 AVENUE ARISTIDE BRIAND
92120 MONTROUGE
FRANCE