Comment visualiser votre essai à l’aide du logiciel Blender ?
- Par Pierre Baudoin, R&D ingénieur chez EikoSim
Blender comme support à l’expérimentation 3D avec corrélation d’images numériques
Saviez-vous que Blender pouvait être utilisé pour visualiser un essai ?
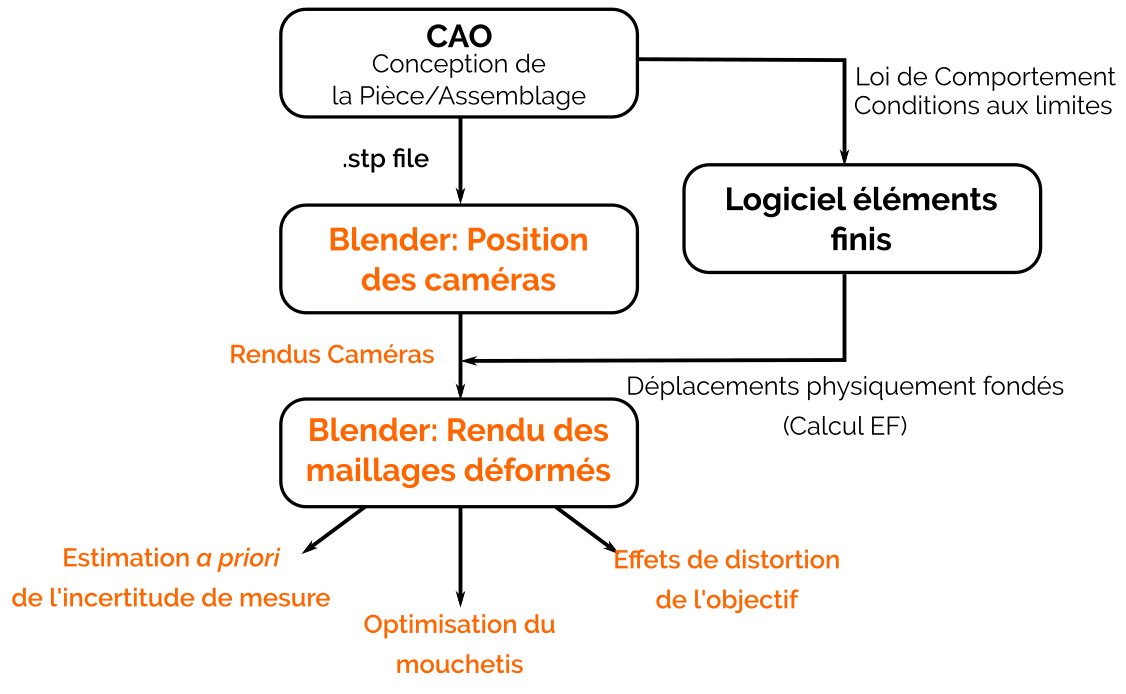
Blender, c’est une suite logicielle de création 3D multi-plateformes, exhaustive et open source, qui permet de générer des rendus photos réalistes, des animations, et même des longs métrages en images de synthèse. Le moteur de rendu de Blender peut produire des rendus physiquement fondés (influence des reflets, effet de réflexion lumineuse des objets 3D, etc.) de n’importe quel environnement 3D. En particulier, on peut se servir de Blender pour la prévisualisation dans un environnement virtuel d’une campagne d’essai à l’aide de fichier CAO (conception assistée par ordinateur), comme proposé par des chercheurs du LMT (ENS Paris-Saclay, France) [1]. Dans ce contexte, une mise en données typiques regroupe les 4 étapes suivantes :
- Conception de la pièce. Cette étape peut être réalisée à l’aide de n’importe quel logiciel de CAO, voire de Blender lui-même. La pièce doit être convertie en maillage 3D surfacique afin de pouvoir être interprétée par Blender (le format .stl, par exemple, est adapté.)
- Texturation. Une fois la pièce maillée et importée dans Blender, une texture réaliste doit lui être appliquée (mouchetis de peinture pour l’échantillon, ou texture métallique pour la machine d’essai, par exemple).
- Positionnement des caméras. Le système de gestion des caméras très complet de Blender permet de prévoir avec précision les champs de visions (FOV) de chacune des caméras. Afin de minimiser l’incertitude de mesure, il est aussi possible d’automatiser le positionnement des caméras pour une application donnée [1].
- Rendu. Une fois les différents éléments du montage d’essai texturés adéquatement, et les caméras positionnées, Blender peut générer des prévisualisations réalistes des images caméras attendues pendant l’essai réel.
Mettre en pratique les étapes précédentes avant toute campagne d’essai permet de s’assurer de la faisabilité à priori, et d’adapter l’équipement employé (caméras, objectifs, éclairage) aux besoins.
Vers la réalisation d’essais virtuels : Blender combiné avec des codes de calcul éléments finis
Si l’on a une idée de la loi de comportement de l’échantillon à tester et de ses conditions aux limites expérimentales, on peut même aller plus loin que l’étape précédente pour prévisualiser notre essai. Les maillages texturés sont déformables directement dans Blender, à condition que l’utilisateur puisse fournir au logiciel un champ de déplacement pour chacun de ses nœuds. On peut donc utiliser le champ de déplacement résultat d’un calcul élément fini afin de déformer un maillage dans Blender et de produire des rendus de l’échantillon déformé (fig.1).
En amont du véritable essai, cette approche présente de l’intérêt parce qu’elle nous permet de tester l’influence de nombreux paramètres sur la précision de mesure. Pour la corrélation d’images numériques 2D, il est courant d’estimer la précision de l’algorithme à l’aide d’essais virtuels similaires pratiqués sur des images numériques [2]. L’intérêt de Blender est de permettre une extension simple de cette approche à la mesure de déplacement 3D, parce que la gestion de déformation de pièces texturées en 3 dimensions est l’une de ses fonctions principales. Pour ne citer que quelques paramètres d’intérêt, cette approche peut être utilisée pour évaluer l’influence d’une distortion de l’objectif ainsi que de la taille et de la forme du mouchetis appliqués sur la précision de la mesure de déplacement.
Un exemple simple de visualisation d’essai dans Blender basé sur une simulation élastique
Repartons d’un cas concret, et attaquons-nous à la préparation d’un essai de flexion simple sur notre maquette d’aile d’avion (fig.2). On peut simuler ce chargement dans Abaqus (fig.2a), en supposant pour l’instant que l’aile a un comportement élastique linéaire isotrope. On suppose de plus que la base de l’aile est parfaitement encastrée dans le bâti, et qu’on applique un déplacement vertical de 2.5mm d’amplitude en son extrémité.
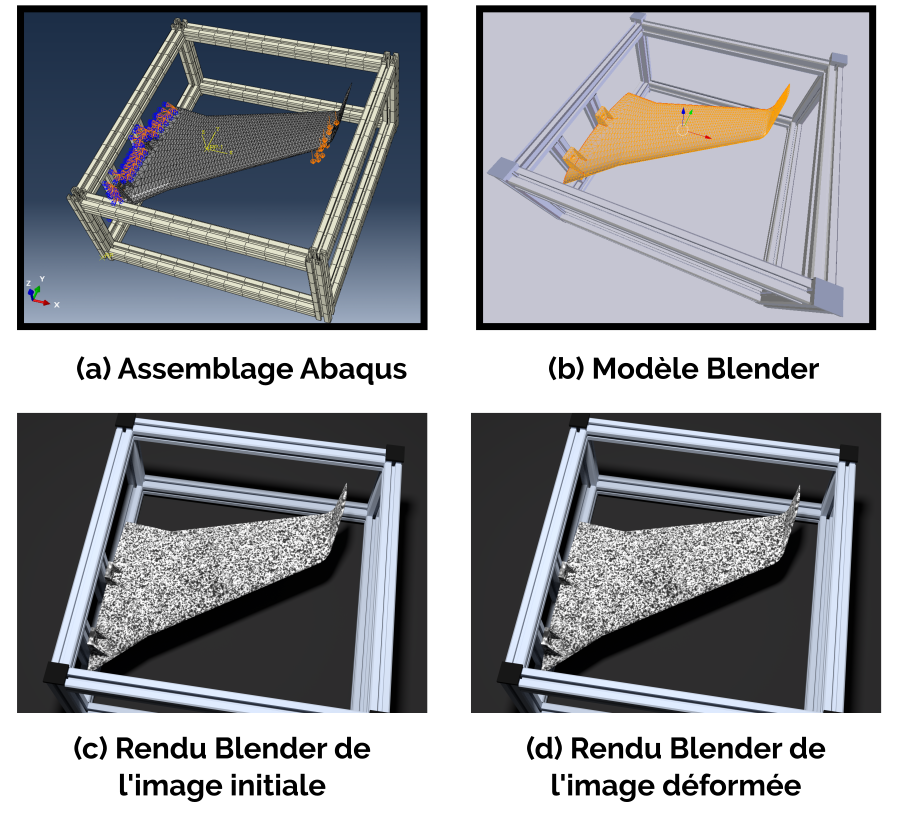
Après un rapide travail de ré-écriture (conversion inp vers stl), le maillage EF peut être importé dans Blender (fig.2b). On applique alors une texture imitant des tâches de peintures aléatoires (mouchetis, fig.2c, seul le rendu de la première caméra est représenté). Finalement, on utilise les déplacements résultats du calcul EF pour déformer le maillage Blender, et générer le rendu de l’aile déformée (fig.2d, seul le rendu correspondant à la première caméra est montré). Dans un autre article, l’utilisation de Blender est détaillée de manière plus approfondie sur le cas d’une structure très complexe.
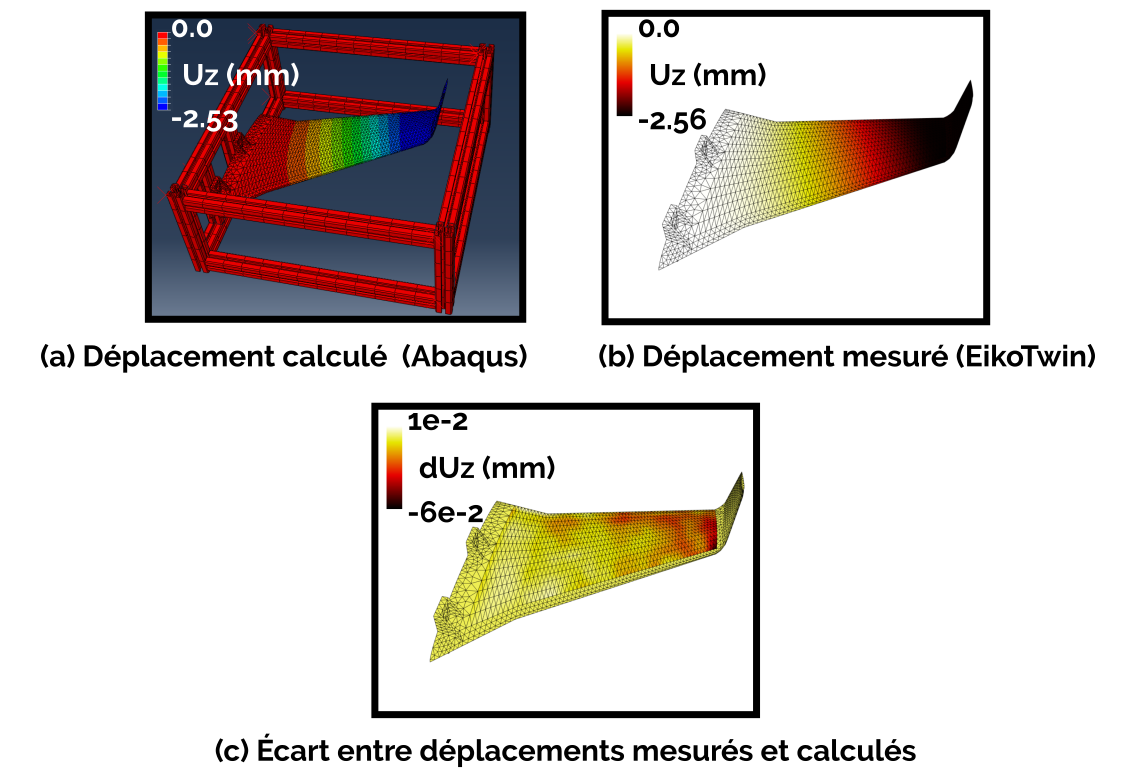
On peut ensuite se servir d’EikoTwin DIC pour mesurer les déplacements 3D en surface de l’aile à l’aide de ces paires d’images virtuelles. Dans ce cas, et même si aucune précaution particulière n’a été prise afin d’optimiser le positionnement des caméras ou la taille caractéristique du mouchetis, le mouvement de flexion mesuré par EikoTwin DIC est très proche de celui imposé depuis la simulation (fig.3a-b). En utilisant la fonctionnalité “charger un résultat élément fini”, nous avons en plus accès à la distribution spatiale de l’erreur entre champ mesuré et champ imposé sur la surface de l’aile (fig.3c), ce qui nous confirme la précision de la mesure.
Pour aller plus loin…
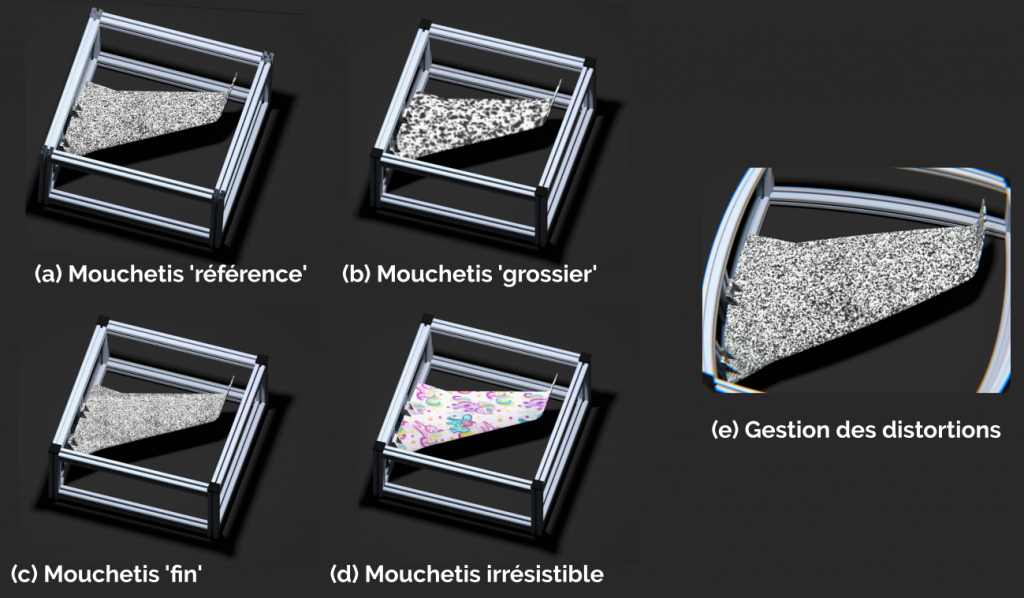
Dans le futur, nous avons le projet d’étendre ce cas test de visualisation dans Blender pour estimer plus précisément la précision de la mesure en fonction des conditions d’essais (fig.4). Pour une géométrie et un maillage EF donnés, quelle serait la texture idéale à appliquer à notre échantillon ? Quelle serait la taille caractéristique de mouchetis la plus adaptée (fig. 4a-c) ou le motif le plus pertinent (fig.4d) ? Quel serait l’impact d’une distorsion des objectifs de caméra sur les déplacements mesurés (fig. 4e)? La réponse dans un prochain post de blog !
Références
[1] Vitse, Matthieu, et al. « Design and optimization of a multi-camera structural test using pre-visualization. » BSSM 13th International Conference on Advances in Experimental Mechanics (2018)
[2] Bornert, Michel, et al. « Assessment of digital image correlation measurement errors: methodology and results. » Experimental mechanics 49.3 (2009): 353-370.


98-100 AVENUE ARISTIDE BRIAND
92120 MONTROUGE
FRANCE