Vérification de la robustesse d’un logiciel de Corrélation d’Images avec SAMWELL Testing Inc.
- Par Clara Minguet, Ingénieure de recherche chez EikoSim
La qualité des mesures de champs de déplacement en corrélation d’images numériques dépend de nombreux facteurs, qui peuvent être :
- Internes au logiciel considéré (implémentation de l’algorithme, fonctions de formes retenues pour la description des déplacements, méthodes d’interpolation des images…) ;
- Externes au logiciel (qualité du mouchetis, résolution des caméras, qualité de la calibration, …)
Afin de valider la robustesse de l’algorithme d’un logiciel de corrélation d’images numériques, il est intéressant de comparer les résultats du logiciel avec d’autres mesures de référence, obtenues indépendamment mais pour des conditions d’essai identiques (mêmes facteurs externes au logiciel). La comparaison peut être réalisée sur l’ensemble du champ de déplacement avec un autre logiciel de corrélation d’images numériques, ou de façon ponctuelle avec un capteur physique.
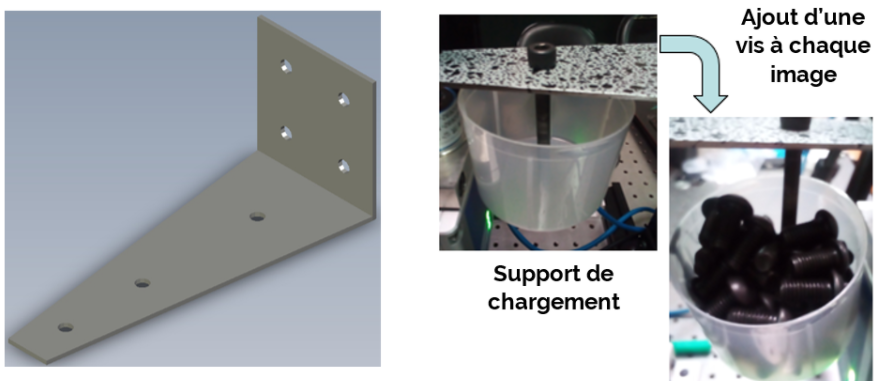
Afin de comparer les résultats d’EikoTwin DIC avec d’autres jauges, ce test a été réalisé au test lab de Samwell Testing Inc. Cet essai consiste à étudier la flexion d’une potence vissée sur un support rigide. La charge est appliquée au niveau du trou central, et est incrémentée de 7,8g à chaque nouvelle image (voir Figure 1).
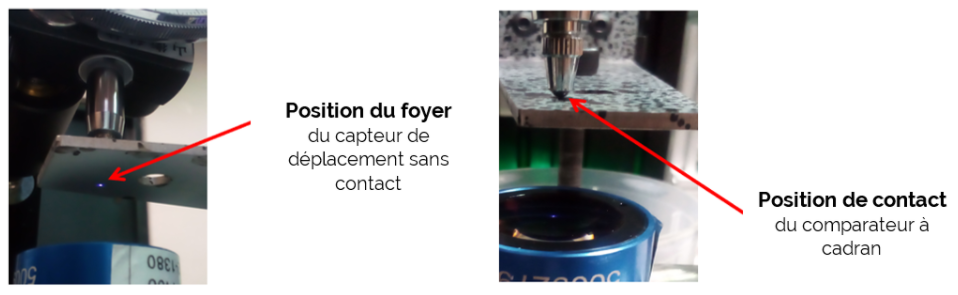
L’essai est instrumenté avec un dispositif de stéréo-corrélation d’images numériques à 2 caméras 12 MP (résolution de 4000×3000). Il est également instrumenté avec un comparateur mécanique à cadran et un capteur de déplacement sans contact mesurant les déplacements à la même position (voir Figure 2).
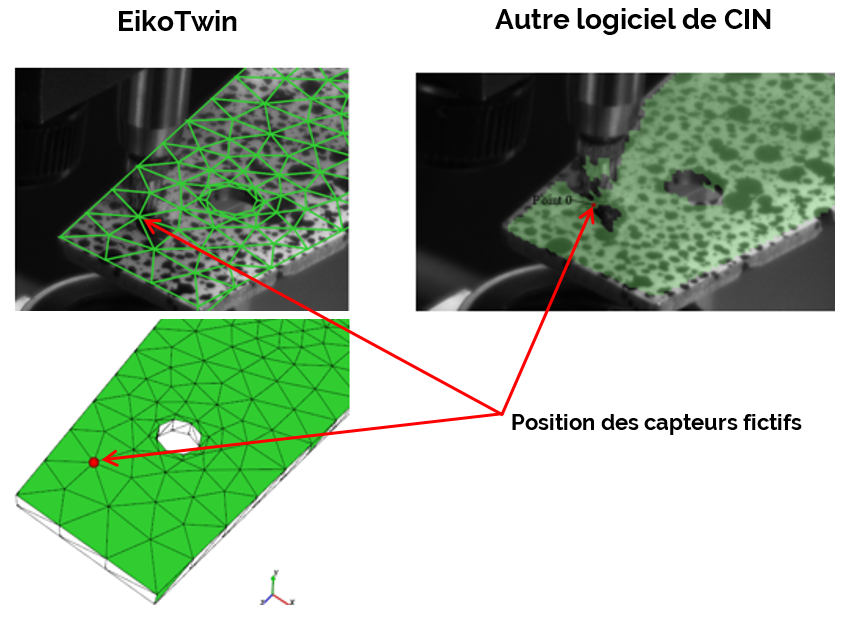
Afin de pouvoir comparer l’ensemble des résultats, il est nécessaire de créer sur les deux logiciels de corrélation d’images des capteurs fictifs à la même position que les deux capteurs physiques (voir Figure 3).
Après post-traitement des images avec les deux logiciels, le déplacement normal à la surface de la pièce mesuré à l’emplacement des capteurs fictifs est exporté. Les déplacements mesurés pendant l’essai par les deux capteurs physiques et les deux capteurs fictifs peuvent désormais être comparés (voir Figure 4).
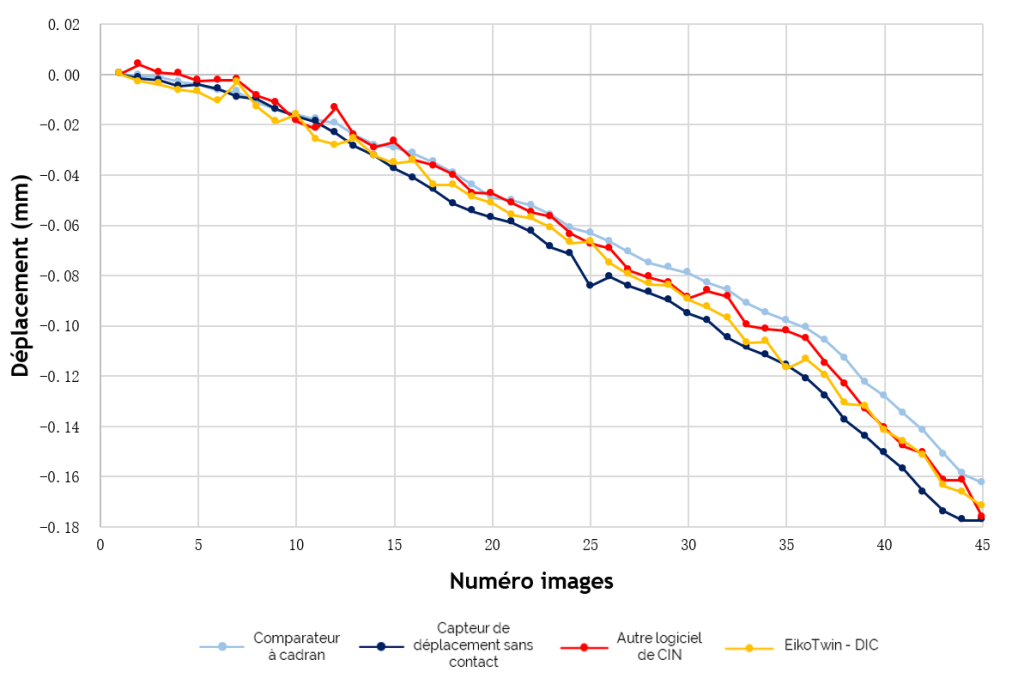
Les résultats en déplacement obtenus avec le logiciel EikoTwin DIC sont encadrés par les résultats obtenus par les deux capteurs physiques. Cela confirme la robustesse de l’algorithme utilisé dans le logiciel EikoTwin DIC pour cet essai. L’écart maximal mesuré en déplacement normal du logiciel EikoTwinDIC avec le logiciel de référence est de 15 µm, avec le capteur de déplacement sans contact de 18 µm et avec le comparateur à cadran de 19 µm.
La prochaine étape de cette étude pourra être une comparaison avec la simulation. Les résultats étant calculés directement sur le maillage EF avec le logiciel EikoTwin DIC, cette comparaison sera bien plus rapide et facile à réaliser qu’avec un logiciel de stéréo-corrélation standard. En effet, dans leur cas, une étape fastidieuse de post-traitement consistant à changer les résultats de repère sera nécessaire. De plus, en utilisant EikoTwin DIC combiné aux capteurs physiques, le repositionnement des capteurs par rapport au maillage se fera plus facilement qu’en utilisant un logiciel de corrélation d’image traditionnel (voir Figure 3). Pour finir, le modèle de simulation pourra être corrigé à partir des mesures en utilisant le logiciel EikoTwin Digital Twin. Pour aller plus loin dans la validation de la robustesse du logiciel, d’autres essais plus complexes pourraient être menés (chargement multiaxial, grands déplacements, chargements dynamiques, etc). De même, la comparaison pourrait aussi être étendue aux déformations, en comparant les valeurs mesurées par Corrélation d’images numériques avec les valeurs mesurées par une jauge de déformation, afin de comparer les performances des logiciels entre elles pour cette seconde métrique.


98-100 AVENUE ARISTIDE BRIAND
92120 MONTROUGE
FRANCE