


Par Matthieu Vitse
Matthieu Vitse est un expert en visualisation scientifique qui exerce en freelance. Il a un doctorat en mécanique numérique de l’ENS Paris-Saclay, et son activité principale se concentre maintenant sur le post-traitement et la visualisation de larges jeux de données de simulations et d’essais complexes.
Plus d’infos sur www.sciviz.fr
(depuis Vitse et al. Toward virtual design and optimization of a structural test monitored by a multi-view system, soumis à SAGE 2019)

Introduction
La visualisation est un élément essentiel dans l’ingénierie mécanique d’aujourd’hui, principalement en raison de la quantité de données à traiter, dans la mécanique expérimentale ainsi que sur son homologue de calcul. Ces aspects de visualisation semblent également devenir de plus en plus importants lors de la préparation des expériences. En effet, la complexité des modèles à identifier nécessite la conception d’une installation expérimentale de plus en plus complexe, la sophistication étant soit mise sur la machine d’essai, son instrumentation ou le spécimen lui-même (ou un mélange de tous).
Prenons un exemple d’une poutre en béton armé soumise à un chargement sismique. La compréhension du comportement à l’articulation poutre-colonne est particulièrement importante car cet élément a une influence très forte sur la réponse mécanique globale de la structure entière, en raison de la complexité de l’assemblage (barres d’armature en acier, ancrages et étriers) et l’occurrence de plusieurs phénomènes physiques couplés (endommagements, nucléation de fissures, croissance et arrêt, décollement de l’interface béton/renfort d’acier, frottement, usure des surfaces de fissure, rôle des débris…).
Une façon d’étudier un tel élément clé est de recourir à des mesures « plein champ » afin d’obtenir une image complète de l’articulation de l’ensemble poutre-colonne. Cependant, il faut se rappeler que même si la géométrie est principalement plane, l’apparition de l’endommagement dans les éléments en béton va probablement briser les symétries et donc briser les éléments plans de la géométrie. Les systèmes de stéréo-corrélation offrent des solutions pour capturer la cinématique 3D des surfaces [1].
En outre, il est favorable d’observer l’articulation, la colonne et la poutre sur différentes faces, et également à différentes échelles [2] pour capturer à la fois le détail de la dégradation articulaire et la déformation à grande échelle des poutres afin de caractériser les conditions de chargement en utilisant la théorie des poutres. Étant donné que ces objets sont minces, en général, une vue globale n’aura pas la résolution spatiale suffisante pour capturer les détails. Ces différentes exigences et contraintes conduisent à une configuration très complexe, comme le montre la Fig. 1: un spécimen encombrant (1), attaché à une machine ayant une géométrie complexe et de nombreuses pièces mobiles (2), et capturé par plusieurs caméras (3).
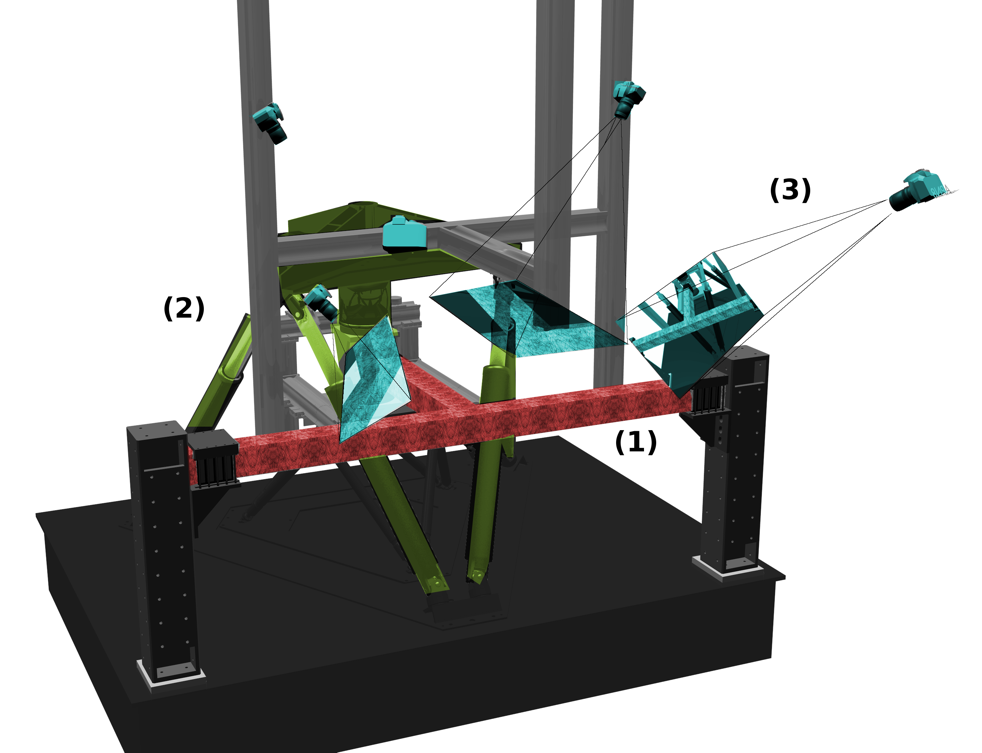

Figure 1 – Blender rendu de la configuration expérimentale (partielle) (1) spécimen de forme en T (rouge), (2) machine d’essai multiaxiale (jaune), (3) plusieurs caméras capturant la scène (bleu)
De nombreuses caméras sont alors simultanément nécessaires pour capturer la cinématique de l’articulation, ce qui a pour conséquence d’ajouter beaucoup de degrés de liberté et de contraintes dans la conception globale de l’expérience (capteurs de caméra, objectifs, sources lumineuses, positions et orientations, …). Plutôt que de recourir à une approche de type « essai/erreur » pour positionner les caméras, l’objectif est de présenter une procédure pour pré-concevoir l’expérience à l’aide de logiciels de rendu 3D.
Cette technique a été utilisée dans l’industrie cinématographique pendant des décennies au cours de la phase de pré-production. Elle est soit exécutée sur le plateau de tournage, ou en utilisant des maquettes avec des géométries plus simples, afin de déterminer la position des acteurs, la position et le mouvement des caméras, en particulier dans les espaces encombrés ou étroits. Elle est également largement utilisée pour les films d’animation 3D pour les mêmes raisons que celle donnée ci-dessus, mais aussi pour éviter les mouvements non réalistes des personnages.
On note toutefois que les besoins de l’industrie cinématographique sont très différents de ceux de la mécanique expérimentale. Cependant, les logiciels de visualisation sont naturellement précis dans leur rendu géométrique, et cette propriété peut être extrêmement bénéfique pour la conception de tests mécaniques complexes, y compris pour l’optimisation du positionnement des caméras. Dans les sections suivantes, nous présentons comment un logiciel d’infographie libre et open source, Blender [3], est utilisé afin de déterminer les caractéristiques, l’orientation et la position des caméras pour la configuration très complexe présentée à la Fig. 1. La section 2 présente la configuration expérimentale. Ensuite, l’acquisition des images ainsi que le modèle de la géométrie dans Blender sont présentés dans la section 3. La section 4 couvre les aspects liés à la couverture de surface ou aux éventuelles obstructions d’ombres et conduit à la validation de la configuration avant sa construction.
Configuration expérimentale
En raison des aspects 3D de la cinématique de la structure, il est nécessaire de combiner au moins deux points de vue différents pour obtenir une mesure 3D (surface) du champ de déplacement. Cependant, cette exigence doit être répétée pour toutes les sections de poutre et de colonne reliées à l’articulation. En outre, comme les dommages peuvent se produire sur toute la surface libre apparente, il est nécessaire d’avoir plusieurs vues complémentaires entourant la configuration, et donc de nombreuses caméras sont nécessaires pour instrumenter l’expérience. La configuration globale est techniquement complexe (Fig. 3).
La longueur de chaque demi-colonne est égale à 1140 mm et celle de la poutre à 1000 mm. La section transversale de la colonne et de la poutre est de 120 × 120 mm2, l’articulation est un cube de 120 × 120 × 120 mm3. Elle est fabriquée à partir de ciment Portland avec des renforts habituels et plusieurs barres en acier à haute résistance — ancrées dans les régions mixtes par des crochets à 90° — pour un renfort longitudinal dans les sections de colonne et de poutre. Pour plus de détails, voir [4].
La texture de surface nécessaire à l’algorithme de corrélation d’image numérique [5, 6] est obtenue en appliquant d’abord un revêtement de peinture, afin d’obtenir un fond blanc, puis une combinaison de technique de pochoir conduisant à un motif de points noirs de 2 mm de diamètre et enfin par l’application au pinceau de peinture noire afin de briser la régularité du motif (voir fig. 4 (b)).
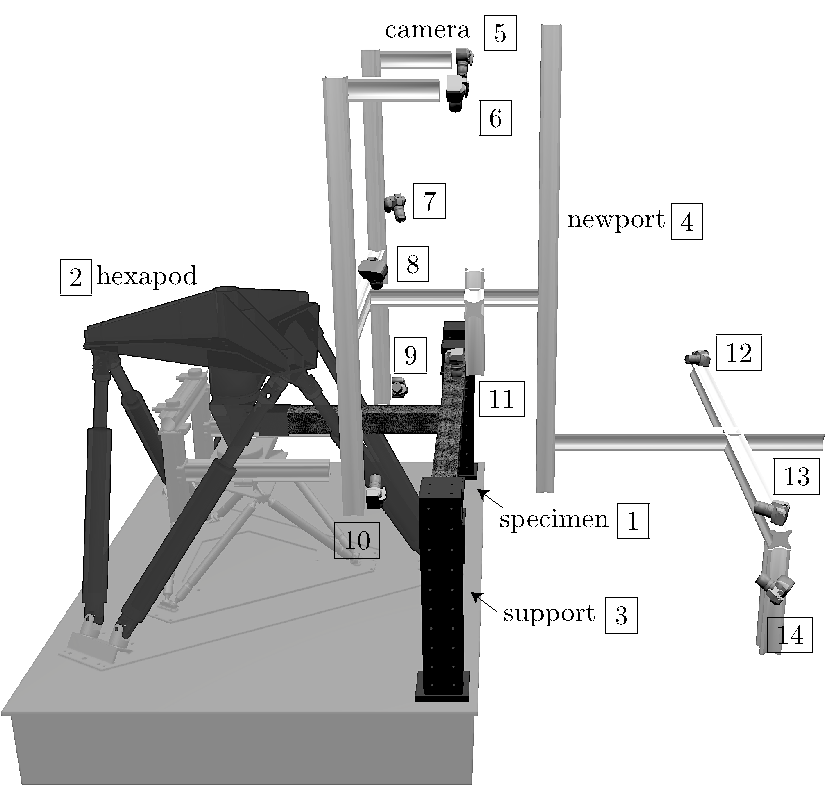

Figure 2 – Vue de l’ensemble de la configuration. (1) spécimen de béton armé, (2) machine d’essai hexapode, (3) support du spécimen, (4) barres Newport pour la fixation des caméras, (5-14) appareils photo numériques.
La machine d’essai est un hexapode (Fig. 2), c.-à-d. une machine 6 axes parallèles. A très peu d’exceptions ([7, 8, 9, 10, 11, 12]), ce type de machine est encore assez rare pour la réalisation d’essais en mécaniques des matériaux et des structures, bien qu’elle offre des capacités de chargement très polyvalentes et complexes. À l’aide de six actionneurs électromécaniques, elle permet une plage de translation (resp. rotation) globale d’environ ± 250 mm (resp. ± 22 °) dans toutes les directions (la gamme réelle de translation et de rotation est complexe en raison de la structure parallèle non cartésienne de la machine).
Comme on le voit sur la Fig. 2, l’échantillon est maintenu en position horizontale, chaque extrémité étant collée à l’intérieur des blocs en acier qui sont attachés à deux colonnes métalliques ([#3] sur la Fig. 3) fixées à la dalle d’acier. Le dernier bloc est relié à la cellule d’effort par un joint sphérique avec un jeu initial nul.
Le spécimen est chargé avec une combinaison de translations horizontales (UY) et verticales (UZ) à l’extrémité de la poutre en utilisant différents trajets de chargement. Ils visent à étudier les potentiels états mécaniques rencontrés par le joint en béton armé lors d’une charge sismique (ici dans des conditions quasi-statiques), et en particulier le couplage entre les différents modèles de fissuration développés dans différentes directions de flexion.
Acquisition des images
En raison de la complexité de l’expérience présentée dans la section précédente, les exigences pour une mesure précise de la cinématique de la poutre sont multiples :
- Les caméras doivent être déclenchées simultanément
- Les caméras doivent capturer différentes faces du spécimen
- La position et l’orientation des caméras doivent être définies afin de pouvoir appliquer la stéréo-corrélation d’images numériques (c.-à-d. qu’au moins deux caméras doivent capturer la même région)
- Les différentes parties de la configuration (y compris les caméras et les éclairages) ne doivent pas occulter des zones du spécimen pour chaque caméra considérée
- Les régions du spécimen observées par les caméras doivent être illuminées uniformément.
L’étalonnage de nombreuses caméras peut prendre beaucoup de temps, ce qui rend la machine d’essai indisponible pendant une longue période de temps. La solution proposée ici pour réduire ces coûts consiste à modéliser l’expérience entière dans un logiciel de modélisation et de rendu 3D. La machine d’essai et le spécimen (y compris ses montages) peuvent être décrits avec exactitude à partir de leurs descriptions CAO qui sont facilement disponibles. L’intérêt principal ici repose sur la recherche de «bons» points de vue pour l’analyse de corrélation d’images numériques, en ce sens que les caméras doivent couvrir adéquatement les zones ciblées et être placées de manière à ce qu’aucun autre objet ne puisse obstruer ou obscurcir la zone d’intérêt. La position des caméras le long du système de barres Newport, le choix des caméras elles-mêmes et leur objectif, ainsi que la position des systèmes d’éclairage supplémentaires peuvent être déterminées avant de mettre en place l’expérience réelle, dans une approche qui sera appelé «Virtual Experimental Design».
Au centre de l’approche se trouve le logiciel de modélisation et de rendu 3D open-source, Blender. Bien que son principal champ d’application soit les films d’animation ou le rendu esthétique 3D (comme on peut le voir sur le site Web [13]), il a la capacité de reproduire des scènes 3D très précises, de façon quantitative (aucune limitation d’approximation géométrique ne sont incluses). Le rendu très photo-réaliste est la principale motivation pour l’utilisation de ce logiciel. En outre, sa polyvalence, son interface flexible, et ses caractéristiques de modélisation de matériaux et de textures sont des caractéristiques très pratiques et puissantes qui sont exploitées ici pour générer des images virtuelles à partir du test. On peut contrôler la texture et les aspects des matériaux utilisés, l’intensité de l’éclairage et les spécifications des caméras utilisées pour le rendu.
1. Pipeline de visualisation
Le pipeline de visualisation (voir fig. 3) est le suivant : la machine d’essai est modélisée et décomposée en différents sous-ensembles dans le logiciel de CAO (dans ce cas CATIA V5) et chaque sous-ensemble est importé dans Blender, en utilisant le format de fichier .STL, largement utilisé pour le prototypage rapide ou l’impression 3D car il décrit efficacement la géométrie de surface des objets 3D (sans aucune représentation de couleur ou de texture), permettant différents traitements visuels pour chacun d’eux dans Blender (en termes de propriétés de matériau ou de texture). Différentes lumières et caméras sont ensuite ajoutées à la scène.
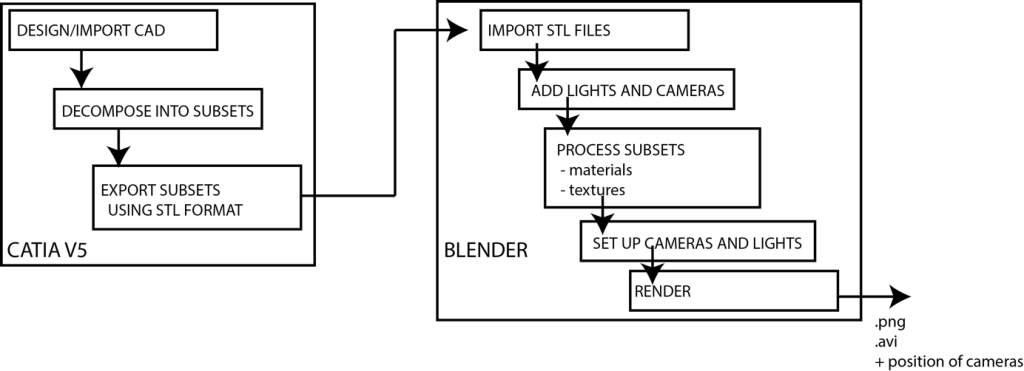

Figure 3 – Pipeline de visualisation: la géométrie du montage expérimental et de la poutre sont pré-traitées dans CATIA avant d’être importées dans Blender où l’environnement (lumières, caméras) est configuré et ajusté, les matériaux et les propriétés des textures du spécimen sont définis et les images de caméra rendues
2. Paramétrisation des caméras
Dans la configuration réelle, les caméras peuvent presque librement être déplacées le long des barres Newport entourant l’hexapode (voir fig. 2) afin de trouver les « bonnes » positions, cette opération est toutefois très longue lorsque de nombreuses caméras doivent être mis en place. On peut imiter ces degrés de liberté dans Blender en reliant les caméras à des chemins, par exemple des lignes le long des différentes barres Newport, qui sont décrits en utilisant des B-Splines rationnelles non-uniformes (NURBS), de sorte que la trajectoire de la caméra peut être configurée. Une zone d’intérêt peut être spécifiée, de sorte que la caméra continue d’observer un point donné (avec des contraintes supplémentaires telles que l’horizontalité, par exemple).
3. Application de la texture sur la surface du spécimen
Pour améliorer le rendu du spécimen, une image du mouchetis a été prise sur la poutre réelle. Ce rendu est réalisé en utilisant la fonction de mappage UV de Blender, une technique qui permet de mapper cette texture sur le spécimen virtuel en projetant l’image 2D du mouchetis sur la surface 3D :
- La surface de la poutre (Fig. 4 (a)) est « dépliée » pour créer une carte UV (Fig. 4 (c)),
- L’image du mouchetis (Fig. 4 (b)) est superposée sur la carte 2D (Fig. 4 (d)),
- La poutre est finalement « enveloppée » sur l’objet 3D avec la nouvelle texture (Fig. 4 (e)).
Il est à noter qu’en ajoutant des symétries x et y sur la carte UV du spécimen, on peut créer un mouchetis continu, afin d’éviter l’apparition d’un grand nombre de discontinuités sur la texture lors de l’étape 3 décrite ci-dessus. Bien que ces aspects de texturation ne soient pas obligatoires pour le positionnement des caméras (même s’ils peuvent fournir des informations supplémentaires à l’expert), ils sont d’une importance majeure lors de l’évaluation des incertitudes de mesure.
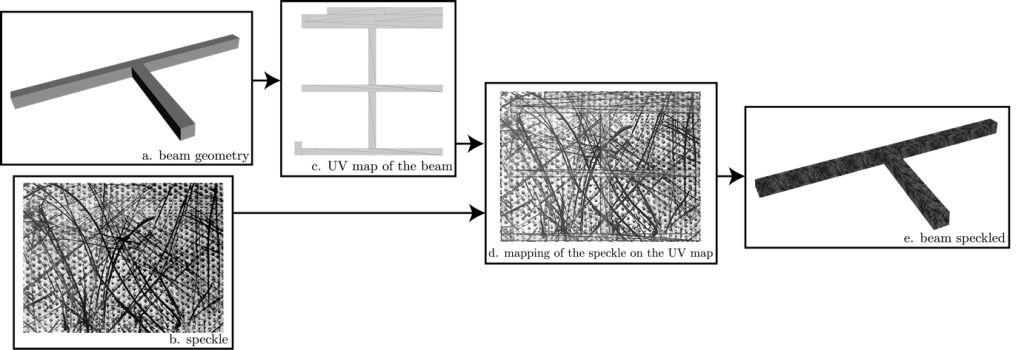

Figure 4 – Etapes pour le mouchetis de la poutre dans Blender : la structure 3D (a) est dépliée, créant une carte UV (c) sur laquelle le motif de texture (b) est appliqué (d). La structure non enveloppée est ensuite enroulée (e)
4. Couverture de surface et obscurcissement
Cette section détaille les aspects essentiels de la modélisation de l’expérience, au cours desquels nous couvriront des sujets tels que le choix de la caméra, son positionnement dans l’espace 3D afin d’éviter les éventuelles obstructions des objets (Newport bars, lampes, …), la couverture de surface des zones cibles, l’influence de l’éclairage et l’apparition des ombres en raison d’une éventuelle région masquée qui peut dégrader les résultats de l’algorithme de corrélation d’images numériques. Afin de couvrir ces éléments, on peut imaginer que la position du dispositif expérimental et du spécimen sont connus et que la position des caméras doit être définie le long des barres Newport.
De nombreux paramètres des caméras peuvent être spécifiés dans Blender, tels que la taille du capteur, la profondeur de champ ou la longueur focale de l’objectif. Cela permet de déterminer la couverture de surface pour différentes configurations d’ensembles {Caméra + Objectif}. Une fois la scène initiale mise en place, il est facile pour l’utilisateur de faire le meilleur choix de l’ensemble {Caméra + Objectif} et de position afin d’éviter les obstructions des objets de la scène ou de déterminer a priori la meilleure configuration pour la mesure par corrélation d’images numériques.
L’éclairage est également une question essentielle lors de la mesure par corrélation d’images numériques. La modélisation fine des lampes LED est un aspect très important pour améliorer la qualité de l’essai. De la même manière que les caméras sont positionnées, des sources lumineuses peuvent être ajoutées à la scène virtuelle et améliorer la conception de l’expérience, en gardant à l’esprit qu’il faut s’assurer qu’aucun élément (source de lumière, caméra, barre Newport ou même câble) ne génère des ombres sur les zones d’intérêt. Tous ces éléments peuvent être ajoutés assez finement à la scène 3D si nécessaire.
Blender contient des fonctionnalités utiles qui permettent de représenter les sources lumineuses et l’ombrage projeté des objets sur la scène : par exemple, les émissions de lumière directes et indirectes peuvent être prises en compte, ce qui est essentiel pour la conception d’essai multi-caméras avec de nombreux objets pouvant gêner la visibilité. Différentes sources lumineuses sont utilisées, avec des directions d’émission isotropes ou spécifiques (cône, carré ou rectangle, très utile pour modéliser des panneaux LED), ou en tenant compte (ou non) de l’atténuation de distance. Les effets d’ombrage (an)isotrope peuvent également être modélisés, avec une attention particulière faite sur l’interpolation entre les zones lumineuses et les zones ombragées qui peuvent induire du bruit pendant le post-traitement de corrélation d’images numériques.
Toutes ces fonctionnalités permettent une représentation 3D précise de l’expérience, le niveau de précision dépendant de l’objectif : positionnement statique, influence des volumes d’éléments donnés, obstructions et création d’ombres, ou besoin de rendu photo-réaliste pour une optimisation.
5. Génération des images virtuelles
Par exemple, le résultat pour le choix manuel des caméras 7, 8 et 11 de l’expérience est détaillée ici. D’abord leurs emplacements approximatifs (Fig.5) ont été décidées pour cibler l’articulation poutre-colonne. Le type de capteurs et les objectifs (donnés dans le tableau 1) ont ensuite été choisis pour obtenir une taille approximative de pixel (grande pour la caméra 8 pour mesurer le déplacement global, petit pour la caméra 11 pour capturer avec précision le champ de déplacement sur la surface de l’articulation). Enfin, l’ouverture (Tableau. 1) est fixée pour assurer une profondeur de champ suffisante.
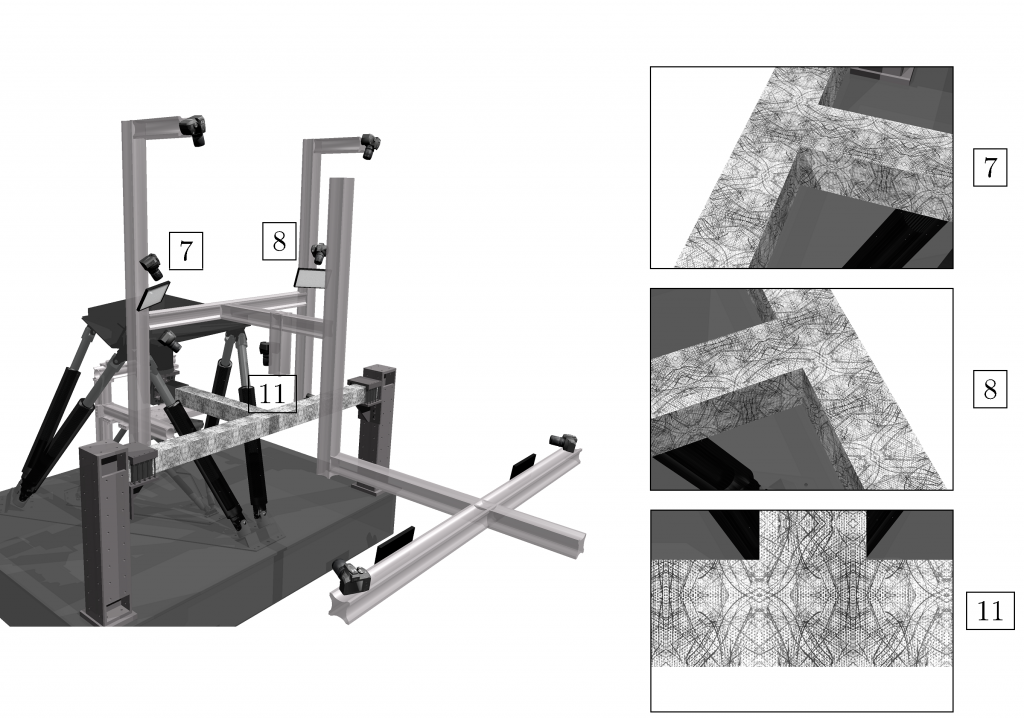

Figure 5 – Vues des images virtuelles générées pour les caméras 7, 8 et 11 de l’expérience
camera # sensor resolution lens Aperture (f)
11 (Canon 60D) CMOS 22.3 × 14.9 mm² 3456 x 2304 35 mm 15
7 (Canon 45D) CMOS 22.2 × 14.8 mm² 3088 x 2056 50 mm 15
8 (Canon 45D) CMOS 22.2 × 14.8 mm² 3088 x 2056 50 mm 15
Table 1 – Spécifications de l’appareil photo et de l’objectif pour trois points de vue
Conclusion
La complexité des essais augmente, et l’utilisation de tests virtuels est un excellent outil pour réduire le temps de préparation de ceux-ci.
Le logiciel Blender utilisé dans cette étude montre de grands avantages dans cette perspective : son ingrédient principal est qu’il peut générer des images photo-réalistes. On peut aussi mentionner que son développement repose sur une énorme communauté d’utilisateurs et de développeurs, ce qui est un grand avantage pour le développement de nouveaux outils tels que ceux mentionnés dans cet article.
La caractéristique la plus utile de Blender est probablement son interface Python, qui permet l’utilisation de scripts de processus (comme un moyen d’automatiser la procédure de rendu), l’extraction et le calcul des différents paramètres ou opérateurs, tels que la taille de pixel ou les matrices de projection des caméras, afin d’effectuer ensuite l’optimisation automatique de ce système.
Aujourd’hui, Blender peut être utilisé afin d’étudier la faisabilité d’essais de corrélation d’images numériques à priori en le combinant avec un logiciel de calcul d’éléments finis.
Références
[1] J.-E. Dufour, S. Leclercq, J. Schneider, S. Roux, and F. Hild, “3D surface measurements with isogeometric stereocorrelation: Application to complex shapes,” Optics and Lasers in Engineering, vol. 87, pp. 146 – 155, 2016.
[2] J. C. Passieux, F. Bugarin, C. David, J. N. P´eri´e, and L. Robert, “Multiscale displacement field measurement using digital image correlation: Application to the identification of elastic properties,” Experimental Mechanics, vol. 55, no. 1, pp. 121– 137, 2014.
[3] Blender Online Community, Blender – a 3D modelling and rendering package. Blender Foundation, 2018.
[4] A. E. Iskef, Technologies informatiques pour l’étude du comportement expérimental et numérique d’un assemblage poutre-poteau en béton armé. PhD thesis, ENS Cachan, 2016.
[5] F. Hild and S. Roux, “Digital Image Correlation,” in Optical Methods for Solid Mechanics. A Full-Field Approach (P. Rastogi and E. Hack, eds.), (Weinheim (Germany)), pp. 183–228, Wiley-VCH, 2012.
[6] M. A. Sutton, J. J. Orteu, and H. Schreier, Image correlation for shape, motion and deformation measurements: Basic Concepts, Theory and Applications. New York, NY (USA): Springer, 2009.
[7] A. Stokes, M. Gardner-Morse, D. Churchill, and J. P. Laible, “Measurement of a spinal motion segment stiffness matrix,” J. Biomech., vol. 35, pp. 517–521, 2002.
[8] F. Motoyoshi, M. Takanori, I. Tadashi, K. Takaya, K. Yuichi, and I. Satoru, “Development of 6-Axis Material Tester for Measuring Mechanical Spine Properties,” J. Robot. Mechatron., vol. 18, no. 2, pp. 160–166, 2006.
[9] J. G. Michopoulos, J. C. Hermanson, and A. Iliopoulos, “Towards a recursive hexapod for the multidimensional mechanical testing of conmposites,” in International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2010, 2010.
[10] B. Ding, R. M. Stanley, B. S. Cazzolato, and J. Costi, “Real-time FPGA Control of a Hexapod Robot for 6-DOF Biomechanical Testing,” in 37th Annual Conference on IEEE Industrial Electronics Society, 2011.
[11] M. Ismail, “Novel hexapod-based unidirectional testing and FEM analysis of the RNC isolator,” Struct. Cont. Health Monit., vol. 23, no. 6, pp. 894–922, 2016.
[12] A. Carpiuc-Prisacari, M. Poncelet, K. Kazymyrenko, F. Hild, and H. Leclerc, “Comparison between experimental and numerical results of mixed-mode crack propagation in concrete: Influence of boundary conditions choice,” Cem. Concr. Res., vol. 100, pp. 329–340, 2017.